

0 引言
自动驾驶和智能航运是智能交通先导应用的两大重点领域。从国外研究与行业应用情况来看,目前自动驾驶领域主要集中在多传感器融合、感知决策算法优化、车辆动力学控制技术、技术融合[1-2]等方面,如:Waymo提出激光雷达+视觉融合的多源传感器融合架构,实现了多模态特征对齐,目标检测精度大幅提升[3];特斯拉研发基于深度强化学习的决策算法并投入应用[4]。除了Waymo[3]的自动驾驶出租车服务外,特斯拉[4] Autopilot系统,德国的戴姆勒、宝马、大众及日本的丰田、本田等传统车企的高级别自动驾驶系统均在车辆远程控制执行技术方面取得了实质性应用进展,通过使用人工智能(Artificial Intelligence, AI)实施行程规划使换乘效率提升约25%。在智能航运领域,就目前来看,智能船舶、船岸协同、传输技术仍是研发和应用重点。欧盟早在2012年就启动了智能化及网络支持的海上无人导航系统项目(Maritime Unmanned Navigation through Intelligence in Networks, MUNIN)[5],2021年全球首艘全电动智能航行集装箱船投入运行。日本于2014年开启了智能船舶应用平台项目(Smart Ship Application Platform, SSAP),建立了船舶设备数据的标准化方法[5],又于2020年启动了无人驾驶船舶项目(Mobility Evolution Group for Urban Innovation 2040, MEGURI2040),并于2022年初完成实船验证,实现了船舶智能航行领域的多项技术突破[6]。韩国目前正在实施自主航行船专项(Korea Autonomous Ship Standardization, KASS),计划用5年时间(2020—2025年)突破智能航行、机械自动化等核心技术[6]。
总体来看,近年来国际上智能交通技术的研究与推广应用取得了重要进展,但在感知能力提升、决策仿真与规划设计智能化、智能设备与仪器研发、大数据与算法能力提升、远程控制与协同、数据与性能安全保障等方面仍需要进一步突破[7]。本文将结合交通运输部智能交通先导应用试点工作,自上而下系统梳理我国智能交通相关政策走向,分析先导应用试点的总体思考、目标定位、实施过程与建设成效,采用案例研究、试验验证等方法,自下而上围绕自动驾驶和智能航运两大领域分别提炼智能交通关键技术的研究与应用进展,并采用技术路线图与时间序列分析法对未来两大领域的发展趋势进行预判,结合国内外最新研究进展,提出未来技术攻关与应用的方向和重点。
1 智能交通先导应用试点建设进展
表1 促进智能交通发展的相关政策文件 |
| 发文时间 | 文件名称 | 发文单位 |
|---|---|---|
| 2019年9月 | 交通强国建设纲要[8] | 中共中央、国务院 |
| 2021年2月 | 国家综合立体交通网规划纲要[10] | 中共中央、国务院 |
| 2022年1月 | “十四五”现代综合交通运输 体系发展规划[11] | 国务院 |
| 2023年2月 | 数字中国建设整体布局规划[9] | 中共中央、国务院 |
| 2020年12月 | 关于促进道路交通自动驾驶 技术发展和应用的指导意见[12] | 交通运输部 |
| 2021年8月 | 关于科技创新驱动加快建设 交通强国的意见[13] | 交通运输部、 科技部 |
| 2021年7月 | 智能网联汽车道路测试与 示范应用管理规范(试行)[14] | 工业和信息化部、 公安部、 交通运输部 |
| 2021年8月 | 交通运输领域新型基础设施 建设行动方案(2021—2025年)[15] | 交通运输部 |
| 2021年10月 | 数字交通“十四五”发展规划[16] | 交通运输部 |
| 2022年3月 | “十四五”交通领域科技 创新规划[17] | 交通运输部 科技部 |
| 2023年7月 | 国家车联网产业标准体系 建设指南(智能网联汽车)[18] | 工业和信息化部、 国家标准委 |
| 2023年11月 | 自动驾驶汽车运输安全服务 指南(试行)[19] | 交通运输部 |
| 2024年4月 | 关于支持引导公路水路交通基础设施数字化转型升级的通知[20] | 财政部、 交通运输部 |
为落实以上政策文件及全国交通运输工作会议精神,2021年11月,交通运输部启动智能交通先导应用试点工作[21-22]。本次试点工作的定位是:以促进前沿技术应用为目标,坚持以安全可控为底线,按照从技术和法规制约较少、环境相对可控逐渐到复杂开放场景的路径,通过实施一批行业属性突出、业务需求明确、工作基础良好、示范作用显著的项目,“以点带面”广泛动员创新资源,凝聚形成技术指南、标准规范,为明确下一步技术攻关重点,研究制订相适应的法律法规提供实践依据。截至2024年12月,第一批18个试点项目 [23]到期均完成了现场核验和集中验收,其中自动驾驶方向14个、智能航运方向4个。通过试点,加速了智能交通技术迭代,实现了车辆厘米级精准定位,并可支持上百台车辆的云端多车协同管控,推动建设了一批路侧感知系统、路侧计算设施、车用无线通信网络、定位和导航设施、交通云控平台、数字航标、沿海5G通信基站等新型基础设施,推动了多项地方政策出台,形成一系列技术标准、指南和规范,促进了运行模式的创新,形成了具有真实应用场景的自动驾驶、智能航运 “中国方案”。
2 智能交通先导应用典型案例
2.1 北京城市出行服务与物流自动驾驶先导应用
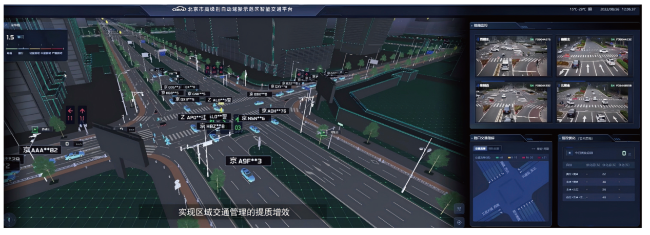
北京城市出行服务与物流自动驾驶先导应用试点[23]基于车路协同技术,应用北京市高级别自动驾驶示范区完善的路侧感知基础设施,通过在示范区道路搭载边缘计算节点、通信终端、低时延摄像头、毫米波雷达、激光雷达等感知设备,对道路环境多源感知数据进行实时融合,形成全量感知3D机动车、非机动车、行人的数字孪生还原和交通事件的智能检测,相关数据通过自动驾驶车辆、无人配送车、无人售卖车、智慧公交、公路货运车上搭载的车载智能终端OBU进行接收,提升自动驾驶的安全性和可靠性。试点内容主要涵盖以下方面。
一是建立自动驾驶城市级工程验证平台,如图1所示。采用国产低成本组合惯导,打造多传感器感知融合系统,实现多信号源冗余优势互补,实现对障碍物、信号灯、标志牌等信息的精准识别。以网络、通信、安全等为基础,打通城市交通数据底座,通过车路云一体化技术,实现运行态势实时感知和事件识别提醒,并对相关城市级工程进行验证。
二是保障自动驾驶、车路协同设备之间的安全认证和安全通信,构建完善的车辆监管体系,如图2所示。当营运车辆间进行安全通信时,车载设备首先需要获取注册证书和身份证书,使用身份证书对广播的通信消息进行签名,保证消息来源的真实性、机密性、完整性和抗抵赖性。当营运车辆与自动驾驶监管平台通信时,采用证书实现双向身份认证和数据安全加密功能,保证自动驾驶监管平台与车辆间传输信息的安全性和可追溯性。由此实现车辆可信接入、车辆定位及自动驾驶数据的可信采集。
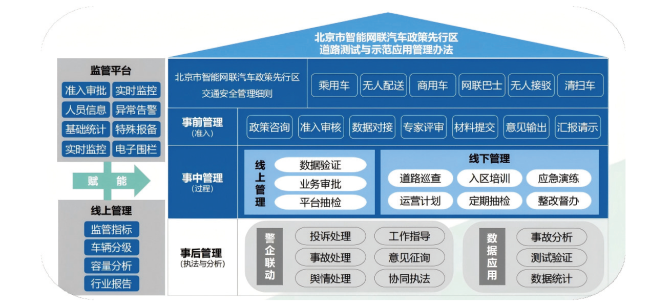
三是依托示范区设立全国首个智能网联汽车政策先行区。以政策和制度创新为核心,在政策法规红线内进行一定的先行先试,在配套政策体系下,聚焦乘用车类、客车类、货车类、功能型无人车类、特种作业车类等5类车型,结合各车型开展的测试示范阶段以及适用的场景,加速政策研究及落地,包括在全国率先开放自动驾驶出行服务商业化、给予无人配送车路权允许其上路运营、开放自动驾驶汽车高速公路测试、开放无人化道路测试等,为智能网联汽车新技术和新产品的落地应用提供了良好的发展环境。
2.2 天津港集装箱水平运输自动驾驶先导应用
天津港集装箱水平运输自动驾驶先导应用试点[24]采用自主研发设计的智能转运车,又名人工智能运输机器人(Artificial Intelligent Robot of Transportation, ART),作为水平运输自动驾驶工具,通过在码头布置高精地图、5G 网络、北斗系统等基础设施,利用物联网、云计算、大数据、人工智能等全新信息技术与港口生产、管理、服务深度融合,打造了全球首个智能化集装箱码头。通过构建智能交通管控系统、智能水平运输系统、智能化数字孪生系统等实现了集装箱水平运输的全无人、全天候、安全稳定作业,成为全球集装箱码头的新旗舰,为传统集装箱码头提升自动化水平提供了新的解决方案。试点内容主要涵盖以下方面。
一是自主研发智能转运车ART,如图3所示。该设备应用激光、雷达、北斗、5G和人工智能视觉识别等先进技术,采用车规级高算力域控制器,可自主完成感知、智能规划、智能决策等自动驾驶功能,实现厘米级微动控制和快速准确对位,具备高开放性(支持不同驾驶脑),可在中小雪、大雾、大雨天气下稳定可靠地开展港口作业,真正实现在复杂场景中的高精度、全无人、安全稳定运输作业。

二是自主研发智能水平运输系统。系统研发过程中破解了多项技术难题,设计了一种可适配具有不同动力学特征的设备和车型的统一接口,定义了行业标准,实现了系统与单车解耦,使 ART 可以灵活运行;系统可实现船舶反向靠泊的路径规划、三级动态泊车管理、多种装船模式下的车序控制、时空一致性的动态路径规划、AI 智能调度、智能阶梯性动态充电、集中式地面锁站动态分配、内外集卡交通管控等多智能体协同作业,有效提升了水平运输自动化、智能化水平。
三是自主研发基于 5G+北斗+AI 的云控平台,如图4所示。码头部署无缝覆盖的 5G 多层网络,形成网络层的多重保护;构建基于北斗的高精度定位系统,实现各类定位终端动态厘米级高精度定位;结合数字孪生技术,搭建基于全景拼接和视频AI 的自动化码头数字舱,实现与码头作业管理系统、视频监控系统间的实时数据交互。
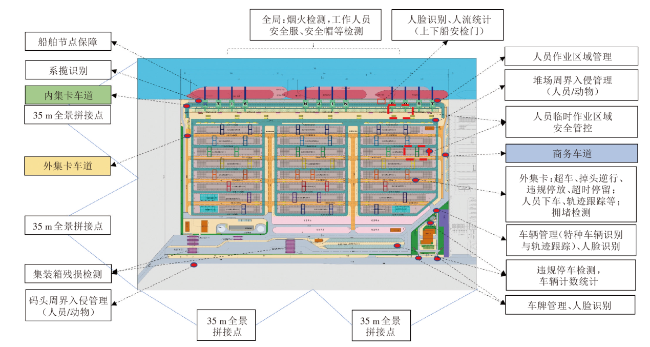
四是基于 3D 建模技术搭建智能化数字孪生系统,如图5所示。系统由码头总览、智慧生产、智能设备、绿色能源、安全环保等5个主题组成;以实时数据驱动岸桥、场桥、ART、船舶、车辆等设备执行动作,从而模拟还原整个码头当前的生产作业等场景;通过切换不同主题,从不同维度对码头运行情况进行可视化场景监测以及数据监控;可实现码头运营在数字孪生全要素场景下的动态数据实时驱动、码头运营的实时监测预警及历史回溯,实现智慧化生产运营。

2.3 国能集团沿海大型散货船智能航运先导应用
国能集团沿海大型散货船智能航运先导应用试点项目[23]针对最具代表性的大型散货船舶,在突破船载宽带卫星通信、海上星基导航增强、航行透明感知和运行监测调度等关键技术的基础上,实现了在航船舶百兆以上可靠卫星通信、海上船舶分米级高精度定位、2海里范围内透明航行等核心应用能力,形成了大型散货船舶智能化升级的成套技术和装备系统。试点内容主要涵盖以下方面。
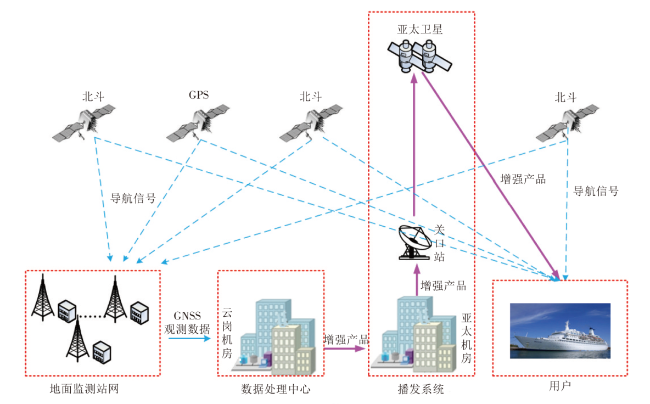
一是基于智能感知、航线自主规划、自主避碰、航行辅助支持、遥控驾驶和自动靠离泊系列关键技术优化升级,实现了多系统功能集成。基于高通量卫星的船舶北斗导航增强系统架构,构建海上北斗星基增强系统,基于高精度融合模型的对流层延迟误差补偿技术,系统性解决北斗星基增强信号质量问题,实现了远洋船舶米级实时定位,提升了海船卫星导航信号的精度和可信性,如图6所示。
二是开发全景感知系统航行安全辅助系统装备,如图7所示。研究船载航行环境感知设备与信息提取技术及海上动态目标信息的高可信融合方法,实现目标检测、目标配准、信息融合、目标跟踪及运动状态估计。根据气象数据、航行数据等实现航线动态优化与局部路径动态优化。基于高通量卫星点波束频谱资源智能分配技术,构建自主可控的海上船舶高可信通信网络,解决了智能船舶重要数据安全稳定传输问题。实现船舶自主感知多元异构数据自动化分析,并融合云端数据,完成船舶驾驶时空信息、周边交通状况信息的融合、分析与评判,支撑船舶在低能级度环境下安全航行。
三是开展装船机自动化推广,实现集装箱船舶智能航行实时监控等作业的船岸协同控制。研发虚实结合的测试平台、运控中心和智能航行测试通信技术,形成大型散货船队智能化运行监测系统,如图8所示。通过相关标准规范和测试规程,为沿海多船舶种类、多作业形式、多驾驶模式智能航行系统综合测试提供技术支撑。采用基于高通量卫星超宽带多入多出功率放大器技术,实现智能船舶大数据传输效率与成本均衡,解决了卫星通信资源供给与稳定传输问题。构建了超视距感知信息服务体系,支持大型散货船舶全过程航行,解决了船舶自身感知能力不足问题。

3 关键技术分析
3.1 自动驾驶领域的关键技术
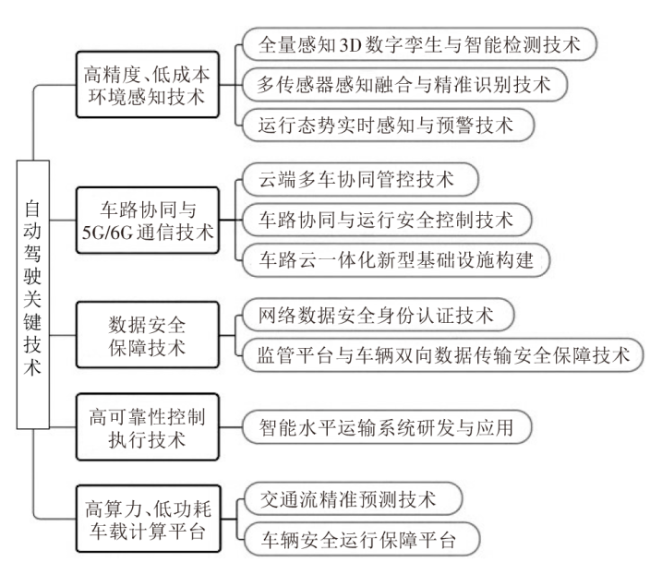
1)高精度、低成本环境感知技术
一是全量感知3D数字孪生与智能检测技术。对多源感知数据进行实时融合,形成全量感知3D机动车、非机动车、行人的数字孪生还原和交通事件的智能检测,相关数据通过车载智能终端接收,提升安全性和可靠性。
二是多传感器感知融合与精准识别技术。采用国产低成本组合惯导,打造多传感器感知融合系统,实现多信号源冗余优势互补,实现对感知障碍物、信号灯、标志牌等信息的精准识别。
三是运行态势实时感知与预警技术。以网络、通信、安全等为基础,打通城市交通数据底座,通过车路云一体化技术,实现运行态势实时感知并提供事件识别提醒。
2)车路协同与5G/6G通信技术
一是云端多车协同管控技术。实现了车辆厘米级精准定位,支持上百台车辆的云端多车协同管控。
二是车路协同与运行安全控制技术。通过“路侧感知-企业云平台-自动驾驶车辆数据采集和下发”实现车路协同控制,以人工智能的机器学习算法、大数据、云计算、无人驾驶等核心技术为支撑,为运行车辆提供运行安全冗余。
三是车路云一体化新型基础设施构建。包括建设路侧感知系统、路侧计算设施、车用无线通信网络、定位和导航设施、交通云控平台、数字航标、沿海5G通信基站等。
3)数据安全保障技术
一是网络数据安全身份认证技术。利用数字签名和加密等技术,保障设备之间安全认证和安全通信,构建网络安全身份认证体系。
二是监管平台与车辆双向数据传输安全保障技术。采用证书实现双向身份认证和数据安全加密功能,保证自动驾驶监管平台与车辆间传输信息的安全性和可追溯性。实现车辆可信接入、车辆定位及自动驾驶数据的可信采集。
4)高可靠性控制执行技术
以新一代智能水平运输系统ART为核心的堆场水平布置边装卸的港口自动化工艺,研创具有自主知识产权的ART车队管理系统,实现路径规划、智能调度、自动充电、地面解挂锁、智能调序、智能泊车、交通管控等功能。
5)高算力、低功耗车载计算平台
一是交通流精准预测技术。打造基于规则驱动与数据驱动相融合的软件模型,提出一种以深度学习模型为基础,结合高精地图约束的预测技术,对交通流进行精准的行为预测和轨迹预测。
二是车辆安全运行保障平台。应用车规级计算平台,通过感知、预测、规划、决策、控制全栈自研算法,基于双备份的控制器架构,用制动和转向冗余来保障车辆的功能安全等级。
3.2 智能航运领域的关键技术
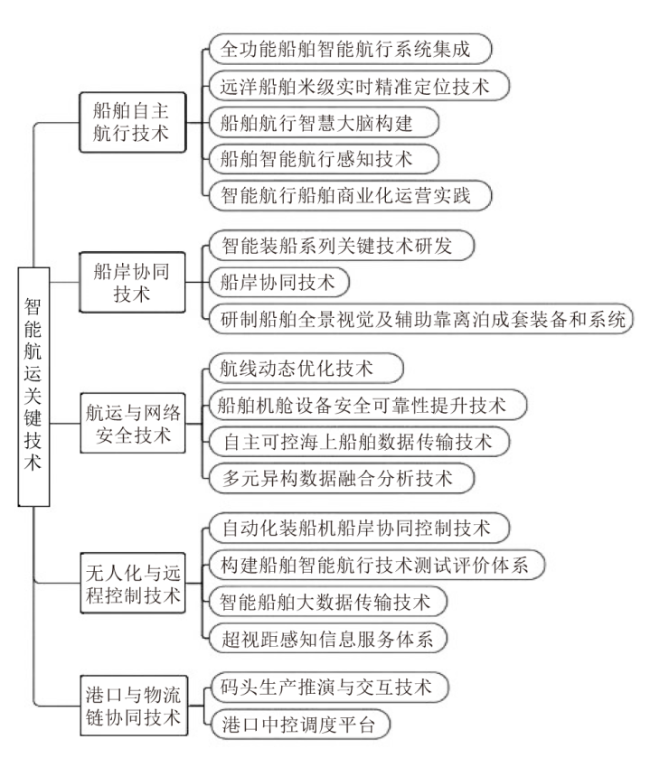
1)船舶自主航行技术
一是全功能船舶智能航行系统集成。基于智能感知、航线自主规划、自主避碰、航行辅助支持、遥控驾驶和自动靠离泊系列关键技术的优化升级,实现了多系统功能集成。
二是远洋船舶米级实时精准定位技术。基于高通量卫星的船舶北斗导航增强系统架构,构建海上北斗星基增强系统,基于高精度融合模型的对流层延迟误差补偿技术,系统性解决北斗星基增强信号质量问题,实现了远洋船舶米级实时定位,提升海船卫星导航信号的精度和可信性。
三是船舶航行智慧大脑。依托超算集群,构建并运行智能航运数字分析模型,为智能助航服务平台推送智能辅助信息。
四是船舶智能航行感知技术。通过采集海洋、水道及相关区域的三维空间数据,采用网络化数字化方式,提供岸基感知、链路增强、导航增强等服务,不仅实现了数字化、智能化,也提升了船舶导航的精准性。
五是智能航行船舶商业化运营实践。依托示范船“智飞”号开展了海上实船智能航行试验、测试、验证和多轮系统优化,实现了智能航行船舶商业化运营。
2)船岸协同技术
一是智能装船系列关键技术。研发多传感融合的智能装船安全感知与避碰平台、基于“北斗+惯导+激光”组合的北斗位姿测量仪、设备防撞系统、船舶建模系统、装船机智能控制系统、基于冗余识别的装船机操控等关键技术,并在多个码头装船场景中推广应用。
二是船岸协同技术。开展智能船舶与岸基协调收集、集成、变换、显示、分析和记录的智能航行示范数据信息应用,探索船舶智能航行与全自动化无人码头的全过程深度融合应用,实现集装箱船舶智能航行实时监控等作业的船岸协同。
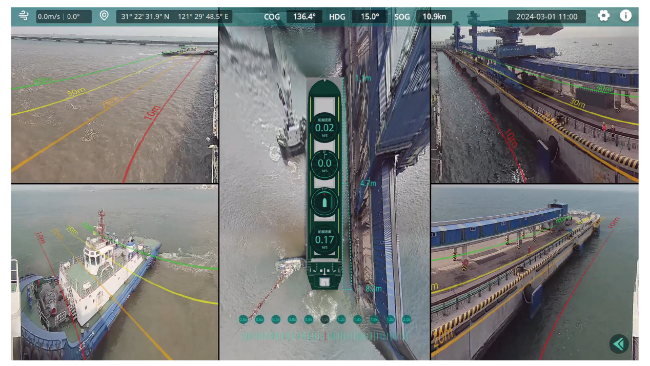
三是研制船舶全景视觉及辅助靠离泊成套装备和系统。利用此套装备和系统,消除了船舶进出港、靠离泊过程中的驾驶视觉盲区。
3)航运与网络安全技术
一是航线动态优化技术。研究船载航行环境感知设备与信息提取技术及海上动态目标信息的高可信融合方法,实现目标检测、目标配准、信息融合以及目标跟踪及运动状态估计。根据气象数据、航行数据等实现航线动态优化与局部路径动态优化。
二是船舶机舱设备安全可靠性提升技术。解决船舶机舱设备种类杂、层级多、耦合强、环境恶劣等条件下的故障监测与诊断问题,为船舶设备安全性和可靠性提升建立基础。
三是自主可控海上船舶数据传输技术。基于高通量卫星点波束频谱资源智能分配技术,构建自主可控的海上船舶高可信通信网络,解决了智能船舶重要数据安全稳定传输问题。
四是多元异构数据融合分析技术。实现船舶自主感知多元异构数据自动化分析,并融合云端数据,完成船舶驾驶时空信息、周边交通状况信息的融合、分析与评判,支撑船舶在低能见度环境下安全航行。
4)无人化与远程控制技术
一是自动化装船机船岸协同控制技术。开展装船机自动化推广,构建全时空、全路径、全覆盖的船岸应用示范体系,实现集装箱船舶智能航行实时监控等作业的船岸协同控制。
二是船舶智能航行技术测试评价体系。研制了虚实结合的测试平台、运控中心和智能航行测试通信系统,形成相关标准规范和测试规程,为沿海多船舶种类、多作业形式、多驾驶模式智能航行系统综合测试提供技术支撑。
三是智能船舶大数据传输技术。基于星地异构链路无缝切换及融合组播与下沉式边缘技术,研究卫星通信传输内容与传输时机的优化方法,采用基于高通量卫星超宽带多入多出功率放大器技术,实现了智能船舶大数据传输的效率与成本均衡,解决了卫星通信资源供给与稳定传输问题。
四是超视距感知信息服务体系。支持大型散货船舶全过程航行,解决船舶自身感知能力不足问题。
5)港口与物流链协同技术
一是码头生产推演与交互技术。研究基于数字孪生技术的散货码头生产过程推演方法及散货码头交互方法。
二是港口中控调度平台。基于人工智能算法的开发和集成,实现系统高度智能化,支持中控调度员在平台内完成调度方案的编制与预演、实时推演、实时修正、设备执行监管,实现中控调度从发起到执行的一体化运作。
4 智能交通发展趋势展望
4.1 自动驾驶领域发展趋势
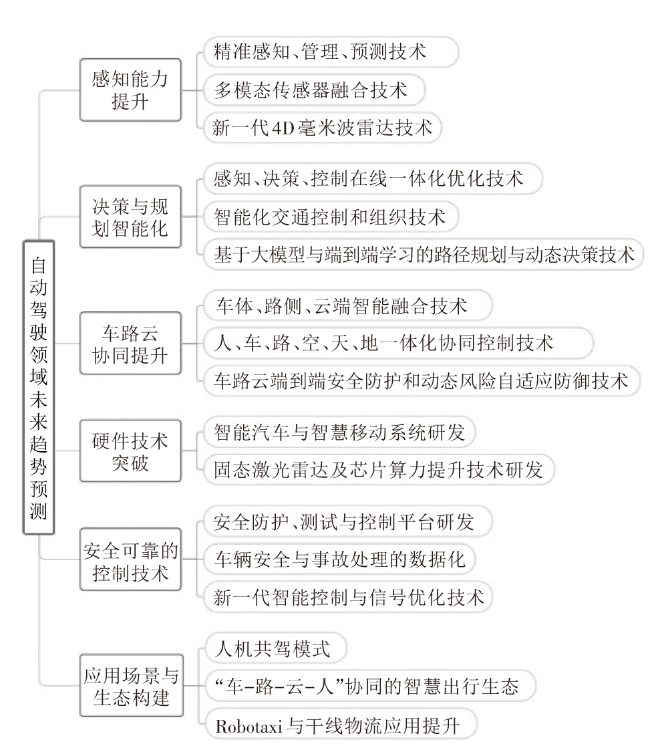
1)感知能力提升[27]
一是建立立体、精准的交通系统感知体系,主动、智能的交通管理技术体系;研发多源数据整合的交通状态精准估计技术,以及常态与非常态交通预测技术。
二是研究激光雷达、高精度摄像头、毫米波雷达等多传感器深度融合技术,实现全天候、全场景的环境感知。
三是通过三维空间信息,弥补传统雷达在垂直方向感知的不足,增强对静态障碍物(如路沿、交通标志)的检测能力。
2)决策与规划智能化[26]
一是突破融合感知、车路信息交互、高精度时空服务、智能计算平台等技术壁垒,推动自动驾驶、辅助驾驶应用。
二是研究信号优化、速度控制优化、实时路径导航、区域交通组织、动态道路利用等智能化交通控制和组织技术。
三是将基于Transformer架构的大规模预训练模型应用于决策系统,通过海量数据训练实现更高效的路径规划和动态决策。
3)车路云协同提升[28]
一是通过路侧智能将大量单体车辆难以观测或观测成本过大的信息传递给车体,辅助车内智能系统进行驾驶策略生成。
二是研究人车路耦合机理与车路协同控制理论与方法,空天地一体化网络的构建,以及高可靠综合交通信息交互方法。
三是研发车路云端到端安全防护和动态风险自适应防御技术,实现多层次、实时协同和智能化主动防御。
4)硬件技术突破[29]
一是研发智能汽车与智慧移动系统,包括基于网络的汽车设计、制造、服务一体化技术及无人机物流关键技术。
二是研发固态激光雷达及芯片算力提升技术,逐步取代机械式激光雷达和弱算力芯片。
5)安全可靠的控制技术[30]
一是研究信息安全防护理论与方法,构建完整的安全测试评价体系和威胁情报共享平台。
二是研究基于智能网联行驶大数据的事故还原、分析、原因和责任认定。
三是基于互联网的交替控制及组织,研究网联条件下的新一代交通信号优化理论与方法。
6)应用场景与生态构建[30]
一是自动驾驶车辆要提供“监督式自动驾驶”与“手动驾驶”的无缝切换,通过人机交互设计提升用户信任度。
二是建成“车-路-云-人”协同的智慧出行生态。
三是进一步扩展与提升Robotaxi服务,干线物流自动驾驶卡车以“主驾无人”模式逐步替代人工驾驶。
4.2 智能航运领域发展趋势
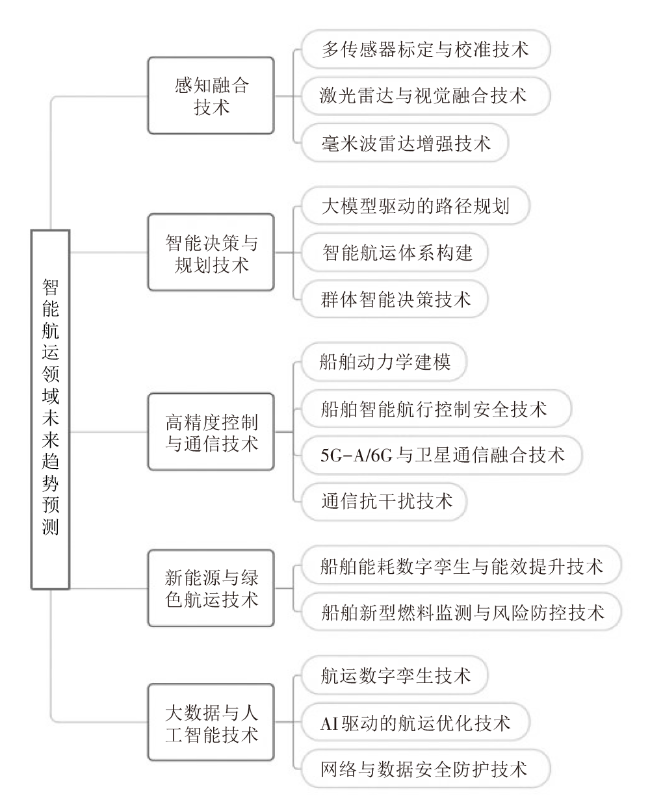
1)感知融合技术[5]
一是建立统一的时空基准,解决传感器的空间和时间同步误差,确保感知数据的一致性。
二是通过深度学习算法,实现激光雷达点云与摄像头图像的实时融合,提升复杂天气下的目标识别精度。
三是开发4D毫米波雷达,提供目标高度信息,解决传统雷达对静态障碍物检测不足的问题。
2)智能决策与规划技术[6]
一是利用架构预训练模型,生成全局最优航线,并动态调整以应对突发状况。
二是研究船舶领域态势感知、规划决策、协同控制、学习推理、网络安全保障等方面的关键理论与核心技术,建立贯穿混合智能、自主智能与群体智能融合迭代过程的智能航运体系。
三是开发多船协同决策算法,实现船舶编队航行、避碰、会遇的自主协调。
3)高精度控制与通信技术[6]
一是建立高精度船舶动力学模型,提升航向控制与路径跟踪的鲁棒性。
二是搭建船舶交通监管与智慧控制集成试验评估平台,通过容错控制技术,设计冗余控制系统,保持船舶航行安全。
三是构建低轨卫星星座与5G-A/6G网络的混合通信系统,实现远洋船舶的实时高带宽通信,支持高清视频传输与远程操控。
四是开发抗海面多径效应、抗电磁干扰的通信协议,确保数据传输的稳定性。
4)新能源与绿色航运技术[31]
一是研发新能源船舶动力系统优化及控制技术、能效数据数字孪生技术,并据此构建基于无人驾驶场景的船舶与港口、航线动态融合的全船能效调控平台。
二是研发船舶新型燃料污染物与温室气体排放控制及监测技术,以及基于数字孪生的船舶绿色燃料注储运过程监测与智能风险防控关键技术。
一是构建全要素数字孪生模型,实现全生命周期的虚拟仿真与预测性维护。
二是基于自主学习的船舶自主驾驶,研究面向各类智能船舶的自主海事监管保障系统等方面的核心理论、技术与方法。
三是构建量子加密通信网络,抵御网络攻击,保障航运数据传输安全。
5 结束语
本文主要围绕交通运输部第一批智能交通先导应用试点项目的技术方案与成效开展研究,从智能交通先导应用试点情况看,试点工作突出了技术创新、依托真实场景、面向真实应用,广泛调动了社会各方积极性,有序促进了智能交通技术在交通运输领域的融合应用。其中,自动驾驶技术在环境感知、决策规划、控制执行等方面不断创新,智能航运技术在船舶导航、自动化装卸、大数据分析等方面不断发展。但发展中也需要进一步提升精准化、法制化、协同化、商业化等水平。未来,自动驾驶技术将朝着更高级别的自动驾驶方向发展[29],实现全自动驾驶技术(L5级),彻底颠覆现有的交通出行模式;智能航运技术将进一步提升船舶的智能化水平,实现船舶的自主航行和智能管理[6,31],推动航运业的变革。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}