

0 引言
党的十九大作出建设交通强国和完善统计体制的重大部署,《“十四五”现代综合交通运输体系发展规划》明确提出要创新统计方法,党的二十大对交通强国和统计工作提出了新的更高要求,推动大数据在交通运输统计中的应用。水路货运周转量是运输统计的重要组成部分,同时是国民经济核算中反映交通运输业增加值的重要指标,其为货运量与相应运输距离的乘积。目前,我国各省(直辖市、自治区)水路货运量的数据统计主要采用企业直报方式,而运输距离一般采用固定航线距离。现行固定航线运输距离测算主要依赖传统测绘方法[1](如航空摄影、经纬仪测量等),虽精度较高但存在明显局限:一方面,测量成本高昂、周期长,难以适应新建港口等动态变化;另一方面,数据更新滞后,无法反映航道条件变化对实际航行距离的影响。传统方法测算距离的滞后性会导致周转量统计无法真实反映水路运输的实际运行效率,难以满足现代水路运输统计对时效性和准确性的双重需求,也难以更加高效地反映经济变化情况,亟需建立基于船舶实际航行数据的港口运输距离动态测算新方法。
当前,水运大数据已成为研究船舶运输活动的重要数据支撑。其中,进出港报告数据详细记录了船舶货物运输的关键信息,而船舶自动识别系统(Automatic Identification System, AIS)数据则完整呈现了船舶航行轨迹的动态变化。这两类数据均蕴含丰富的时空位置信息,为深入探究船舶运输特征、优化航线规划等提供了坚实的数据基础。在AIS的研究方面:闫兆进等[2]构建了船舶轨迹提取模型并进行了系统的交通流分析,为航道规划和交通管理提供依据。杨阿华等[3]提出了一种针对敏感水域的船舶异常行为检测框架,并结合AIS数据进行综合评分。杨诗曼等[4]研究了雷达与AIS航迹时空匹配方法,解决了多源数据融合中的关键技术问题,提高了海上目标跟踪的准确性。李永攀等[5]提出了船舶AIS数据时空聚类算法,并对浙沪交界水域的船舶AIS数据进行了时空聚类分析,得出该区域密集出现的船舶种类及船舶密集出现的时间。Altan等[6]基于船舶AIS数据从船舶运输货物流向、船舶类型分布、不同航向船舶的航速与航向等方面分析了伊斯坦布尔海峡的航运特征,为预测航运风险提供支撑。Pallotta等[7]提出基于无监督增量学习的航行轨迹抽取和异常行为识别方法。李锋等[8]开发了基于图像处理和AIS数据的船舶异常行为报警系统,实现多源数据融合检测。刘钊等[9]提出了数据驱动的船舶异常行为识别方法,通过分析轨迹特征自动识别偏离正常模式的行为。石磊[10]提出了一种基于PLSTM-FCN模型的海上高速航行船舶触礁距离实时计算方法,通过融合航海雷达探测的礁石位置数据和AIS船舶动态数据,能够实现触礁距离的实时计算。Huang等[11]以“基于AIS数据的双路径时空注意力网络多属性信息船舶轨迹预测”为切入点,系统梳理了船舶轨迹预测领域的关键技术、方法演进和应用场景。徐婷等[12]分析某绞吸挖泥船的AIS高频数据,对船舶施工轨迹辨识和预测进行了研究。Cen等[13]提出了一种混合注意力机制(Hybrid Attention Mechanism, HAM )的卷积神经网络-门控循环单元(CNN-GRU)模型,实现了对船舶轨迹较高精度的预测。在进出港报告研究方面:申伟等[14]通过对比分析不同区域或类型港口在报告制度执行中的差异性表现,探讨了制度实施过程中存在的标准不统一、执行偏差等问题。诸为波[15]基于大数据和人工智能技术,构建了船舶进出港报告的智慧监管模式,通过自动化数据采集与分析,实现船舶动态的实时监控与异常预警,提升了海事监管的智能化水平。
综上,当前对AIS船舶轨迹数据的应用研究主要集中于航运交通特征分析、船舶异常行为识别、航行轨迹聚类与预测等方面,而进出港报告数据的相关研究较少,主要还停留于支撑管理部门进行数据采集与制度分析层面,缺乏对这两类数据之间关联关系的深入探讨,特别是在基于两类数据融合实现船舶实际航行距离的测算以及支撑水运业务统计方面的应用。鉴于此,本文将AIS数据和进出港报告数据进行关联融合分析,根据船舶实际航行情况进行内河及沿海港口之间的运输距离测算,能及时实现全国港口运输距离矩阵的测算与更新,为水路周转量统计提供数据基础,旨在提高统计效率,减少人力物力的投入,为水运统计的发展与创新提供技术参考。
1 水运大数据概况及特征
1.1 船舶AIS大数据内容及指标
AIS数据主要包括船舶位置信息、船舶静态及航行相关信息,这两组数据相互结合、相互补充,能够有效地支持计算引擎快速查询在某特定时间及区域内所有航行船舶的AIS信息。具体数据内容及指标如表1所示。
表1 船舶AIS数据内容及指标 |
| 数据类型 | 主要内容 |
|---|---|
| 船舶位置 数据 | 消息ID(唯一标识码)、转发指示符、用户ID (唯一标识码)、导航状态、转向率、对地航速、 位置准确度、经度、纬度、对地航向、船首向、 时间戳等 |
船舶静态及航行数据 | 消息ID、转发指示符、海上移动业务识别码 (Maritime Mobile Service Identity, MMSI)、 船舶AIS版本指示符、IMO编号、呼号、名称、 船舶和货物类型、总体尺寸/位置参考、 电子定位装置类型、目前最大静态吃水等 |
1.2 进出港报告数据内容及指标
2016年底,全国海事管理机构取消了船舶进出港签证审批制度,改为船舶进出港自主报告制。自改制至今,我国主要运输水域均已实施船舶进出港报告制度,推广情况实现全覆盖,形成了海量的船舶监管记录信息资源。
进出港报告数据包含船舶静态属性信息和船舶运输货类信息,记录了船舶从出发港至到达港的每个航次运输情况,具体指标如表2所示。
表2 进出港报告数据内容及指标 |
| 数据类型 | 主要内容 |
|---|---|
| 进出港报告申请数据 | 船舶识别号、中文船名、英文船名、IMO编号、 MMSI号、船舶呼号、船籍港代码、总吨位、净吨位、报告编号、机构代码、进出港类型、报告时间、 型宽、型深、所有人、客位、船舶总长、 海船内河船标识、船舶种类代码等 |
| 进出港报告货物数据 | 货物类型、实载货量、是否危险品、 创建时间等 |
| 进出港报告集装箱数据 | 集装箱种类代码、重箱数量、空箱数量、 创建时间等 |
1.3 数据特征
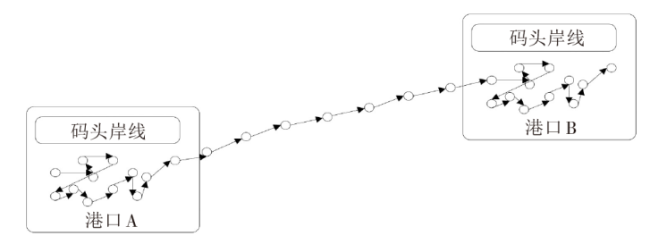
船舶AIS数据实时记录了航行过程中的动态轨迹信息,能够清晰反映船舶的航行与停泊两种典型状态。在内河航道中,船舶的航行行为呈现明显的规律性特征:航行阶段通常沿固定航道直线行驶,轨迹点呈连续线性分布;停泊阶段则集中于特定港口或泊位,表现为空间位置相对固定且轨迹点高度密集的空间聚集特征。这种显著的时空模式差异为船舶行为识别提供了重要依据,特别是基于轨迹点空间分布特征,可准确识别停泊位置并计算停泊点间的航行距离。船舶AIS航行轨迹具体如图1所示。
进出港报告数据作为海事行政监管的重要业务数据,通过船舶到港强制申报机制形成,具有权威性高、结构化强的特点。该数据集不仅包含MMSI号、船舶类型等基础标识信息,更重要的是完整记录了运输业务的核心属性,包括货物分类、危险品标识、实际载货量等关键业务指标。这些详实的运输属性数据为港口运营分析提供了重要支撑,尤其适用于港口吞吐量统计、货物流向追踪、危险品运输监管等研究场景。具体报港流程如图2所示。

AIS数据与进出港报告数据可以通过MMSI号实现船舶唯一标识关联,能够构建起“动态轨迹-运输属性”的完整航运数据链。其中,AIS数据提供高时空精度的连续航行轨迹,但缺乏运输业务维度信息;进出港报告则详细记载了货类、货量、吃水深度及报港港口等关键业务属性,但缺失具体的航行细节。这种互补性不仅可实现数据交叉验证(如通过轨迹分析核验报港记录的完整性),更能支持较高精度的运输距离计算。本研究正是基于这一数据融合优势开展港口间运输距离的测算研究。
2 港口运输距离测算模型构建
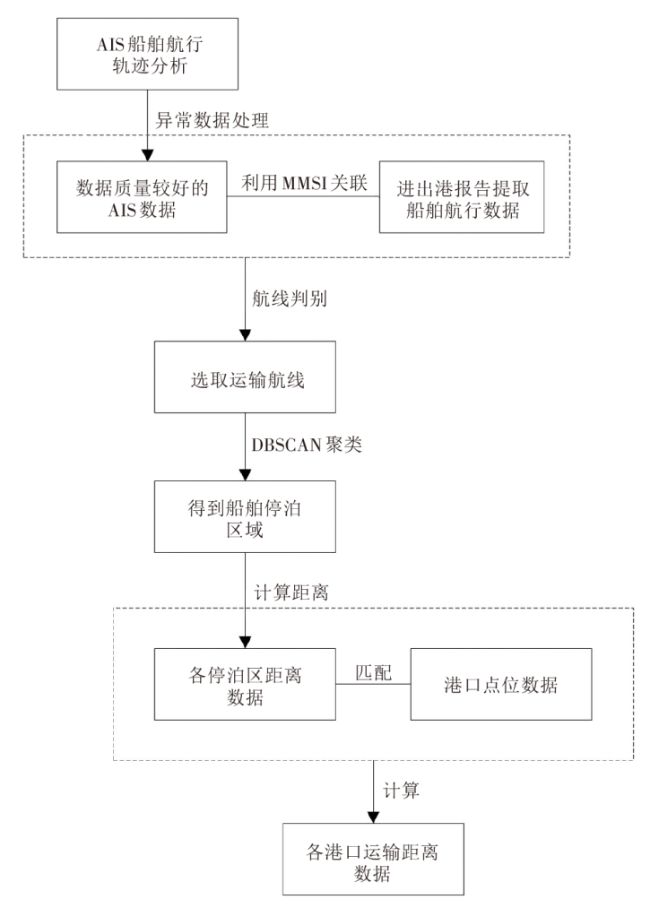
港口运输距离测算模型的构建流程可分为4个主要步骤。第1步,异常数据处理。对原始AIS数据进行预处理,通过数据清洗剔除异常值、缺失值及明显偏离航线的噪声数据。第2步,选取运输航线数据。基于船舶进出港报告提取完整航次信息,利用MMSI号实现与AIS轨迹数据的匹配关联,筛选代表性航线数据。第3步,判断船舶航行状态。运用DBSCAN(Density-Based Spatial Clustering of Applications with Noise)密度聚类算法对船舶运动状态进行识别,准确区分航行状态与停泊状态,形成停泊区经纬度集合。第4步,计算港口运输距离。结合港口地理位置信息系统(Geographical Information System, GIS)数据,判断停泊区经纬度与港口位置距离关系,计算港口实际运输距离,并基于统计方法计算港口平均运输距离,从而建立较完善的港口运输距离测算模型。具体流程如图3所示。
2.1 异常数据处理
正常情况下,AIS数据能够比较准确反映船舶航行状态,但是由于AIS设备准确性、接收基站信号差异等问题,会导致船舶AIS轨迹原始数据出现噪声和偏差。为保证后续轨迹特征点选取的准确度,提高模型的有效性和输出结果的准确性,需要对船舶轨迹数据的关键字段进行预处理。进出港报告数据因管理强制性,数据质量较高,除常规数据清洗外,无需进行异常数据处理。
1)MMSI号准确性判断。AIS设备理论上拥有唯一MMSI号,由纯数字组成,长度位9位,前3位(MID)代表船舶国籍。由于AIS设备更换、人为输入错误或信号干扰,MMSI号容易出现异常。由于异常数据量较小,因此直接将MMSI号异常的数据删除,以提高模型输入数据的有效性。具体异常情况详见表3。
表3 MMSI异常情况 |
| 错误类型 | 异常情况 | 处理方式 | |
|---|---|---|---|
| 位数错误 | MMSI长度≠ 9位 | 删除 | |
| 非法字符 | 包含非数字(如字母、符号) | 删除 | |
| 无效MID | 前3位不在国籍取值范围内 | 删除 | |
| 重复或冲突 | 同一MMSI对应多艘不同船舶 | 删除 | |
2)经纬度范围判断。在我国水域航行的船舶,其轨迹点的经纬度坐标应当位于我国领海及专属经济区的经纬度范围之内。若船舶轨迹中出现若干不连续的境外坐标点,这类异常数据(通常为飞点)将严重影响船舶后续航行距离计算的准确性。因此,在数据处理过程中,需要剔除经纬度超出我国海域范围的坐标点。
3)航速范围判断。AIS数据中,航速是反映船舶动态行为的重要指标之一。合理的航速范围判断可以有效识别异常数据,提高数据质量,确保后续分析的准确性。船舶航速受船舶类型、吨位、航行状态(靠泊/锚泊/航行)等因素影响,具体范围如表4所示。
表4 典型船舶航速范围 |
| 船舶类型 | 典型航速范围/kn | 特殊情况 |
|---|---|---|
| 集装箱船 | 15~25 | 高速集装箱船可超过25 kn |
| 散货船/油轮 | 12~18 | 空载时可能略快 |
| 邮轮/客船 | 18~24 | 部分高速客船可达 30 kn |
| 渔船 | 5~15 | 作业时可能低于 5 kn |
| 拖轮/工程船 | 5~12 | 作业时可能接近 0 kn |
| 锚泊/靠泊 | 0~1 | 受水流影响可能轻微漂移 |
异常航速数据可能由 AIS设备故障、信号干扰、数据录入错误等导致。本研究采用绝对阈值法进行筛选,设定上限为30 kn,下限为0 kn。航速阈值外的AIS数据轨迹具有不确定性,会影响模型结果,同时这类数据占比较少,因此将航速在阈值之外的数据剔除。
2.2 选取运输航线
2.2.1 数据关联
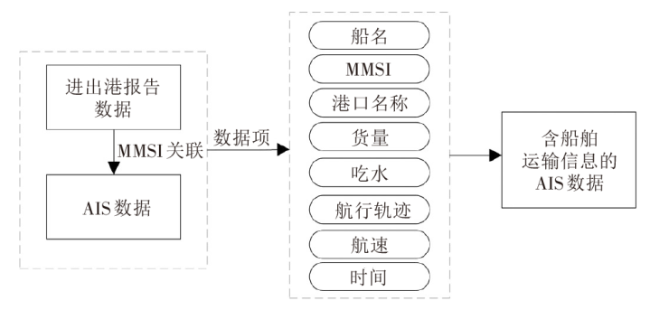
为提高港口运输距离测算的效率和准确性,本研究采用多源数据融合方法进行航线筛选。首先提取本研究中需要的数据种类,AIS数据中提取出静态及航行数据中的MMSI号,以及动态数据中的对地航速、经度和纬度等数据;进出港报告中提取进出港报告申请数据的MMSI号、船名、报港港口、货量、时间、吃水等数据,构建初始航次数据库。随后,通过MMSI唯一标识符实现与AIS船舶轨迹数据的精准关联,获取船舶实时航行轨迹的经纬度、航速数据。这种双向数据校验机制不仅能确保轨迹数据的完整性,还可通过报港数据中的港口信息对AIS定位数据进行交叉验证,有效提升数据质量,进一步提高模型的鲁棒性。将进出港报告中的MMSI号与AIS数据进行匹配关联,可重构船舶完整的航行轨迹,其数据关联逻辑如图4所示。
2.2.2 航线选取
为确保港口运输距离测算的准确性,本研究采用双重筛选机制从AIS和进出港关联数据中提取有效航线数据。
1)基于数据质量的航次完整性评价,剔除低质量轨迹
目前AIS设备使用中存在的设备故障、信号薄弱等情况,可能会导致船载AIS信号无法被基站正常接收,进而导致船舶轨迹的数据不全、航次信息质量低等问题,因此要对船舶航次数据指标进行评价,选择指标评价高的航次进行建模。
主要评价指标有数据完整性指标和数据准确性指标。其中数据完整性指标包括在航次起止时间段内AIS报文条数与港口间AIS数据量比值、AIS缺失总时间段占比、AIS缺失超过1 h段占比等,数据准确性指标包括航次时间内的异常位置点占比,超出船舶合理速度范围的数据点占比等。需判断航次AIS数据质量,优先取数据质量高的航次参与运输距离计算。
2)基于运输状态的货运航次筛选,获取具有货物运输价值的航线
港口运输距离测算可为计算周转量奠定基础。为反映真实的货物周转量,本研究采用基于船舶吃水状态的航次筛选方法,以有效区分货物运输航次与空驶航行等非作业航次。研究中选取货物运输航次,确保分析数据的有效性。根据《国际船舶载重线公约》[16]中船舶安全行驶要求和船舶工程实践,本研究设定空驶航次吃水比阈值α=0.25,选择非空驶航次的数据,若船舶当前吃水深度 与最大吃水深度 的比值满足 ,则判定该航次为非空驶状态。
2.3 判断船舶停泊行为
DBSCAN算法的核心思想是根据数据密度聚类,首先将高密度的点聚为一类,然后逐步归拢相近密度的点,最终生成各种聚类簇。利用DBSCAN聚类方法对某一航行船舶轨迹点进行聚类,则该船舶航行一段时间后会出现不同的聚类簇,将船舶的停留轨迹聚集在一起,最终得到一系列的船舶停泊区域范围,具体流程如图5所示。
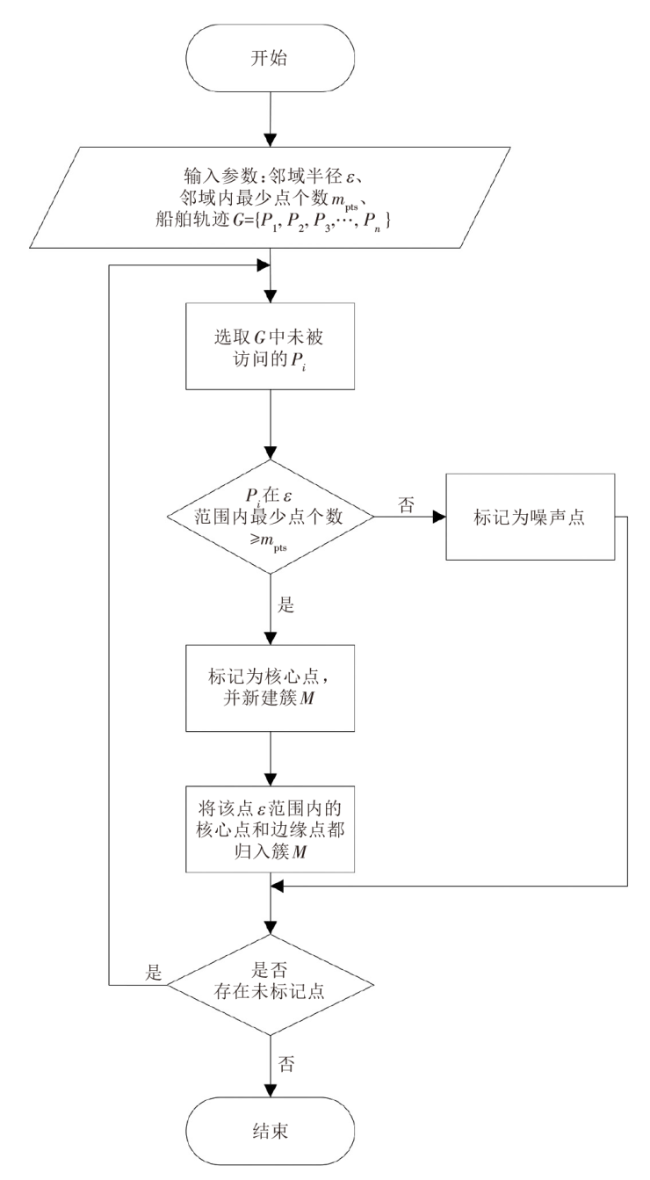
基于DBSCAN聚类算法的轨迹段停留点判别步骤如下。
第1步:提取一段时间的船舶航行轨迹,用G={P1,P2, P3,…, Pn}表示,包含船舶轨迹的经纬度和时间等信息,并按照时间戳顺序排列。
第2步:选择并输入算法中的参数,分别是邻域半径 和邻域内最少点个数 。
第3步:在船舶航行轨迹G中进行遍历,先找到1个孤立的点Pi,即没有被归类的点,选择完后将Pi标记。
第4步:计算Pi在ε范围内的点个数x,若x大于等于 ,则该点标记为核心点,将Pi在 范围的所有点x归入集合M,否则将该点标记为噪声点,标记完后再去船舶轨迹G中进行遍历。
第5步:若M集合中存在没有标记的点,选取其中的点Pj,对其进行标记;若全部点都被标记,则重新去船舶轨迹G中进行遍历。
第6步:重复第3步至第5步,直至M中的所有点都被标记为已访问,程序结束。
2.4 计算港口运输距离
2.4.1 关联停泊区与港口位置
将得到的一系列的停泊区域中心点位置坐标 整理出来,关联港口中心位置表,将停泊区域和港口进行匹配。如果停泊区域的中心点与港口中心点距离QS在5 km范围内,即QS<5 km,则认为该停泊区域属于该港口。
部分港口中心位置如表5所示。
表5 港口中心点位置(部分) |
| 港口名称 | 经度/° | 纬度/° |
|---|---|---|
| 重庆铜梁港 | 106.067 3 | 29.837 73 |
| 重庆綦江港 | 106.644 9 | 29.043 95 |
| 重庆永川港 | 105.899 4 | 29.058 35 |
| 杭州建德港 | 119.511 7 | 29.523 28 |
| 杭州桐庐港 | 119.655 3 | 29.700 27 |
| 湖州长兴港 | 119.941 4 | 30.917 64 |
| 杭州富阳港 | 119.986 1 | 30.058 15 |
异常情况处理:对于单个停泊区匹配多个港口的现象,本研究采用欧式距离计算模型,通过最小化空间距离实现最优匹配;针对港口边界重叠问题,首先建立7 km半径的扩展识别区,再进行二次识别验证,确保港口识别的准确性;针对坐标漂移异常,构建基于船舶运动状态的检测模型,当位移量 >10 km时,通过分析瞬时速度v、航向角θ等参数判断数据可靠性,对确认为异常的数据点进行剔除或修正。具体处理情况如表6所示。
表6 异常情况处理 |
| 异常情况 | 处理方案 |
|---|---|
| 单个停泊区匹配多个港口 | 选择距离最近的港口 |
| 港口边界重叠 | 扩展港口半径至7 km后人工复核 |
| 坐标漂移点(如 >10 km) | 结合船舶航速判断是否为数据错误 |
2.4.2 计算距离
将船舶停泊区与港口匹配后,各港口之间有船舶航行轨迹点集合 ,轨迹集合N中每一个轨迹点 都包含了该船舶的经纬度信息,计算两个轨迹点之间的距离S:
式(1)中: 指纬度; 指经度; 为相邻两个轨迹点的前一个轨迹点的纬度值; 为相邻两个轨迹点的后一个轨迹点的纬度值; 为两点纬度之差; 为相邻两个轨迹点的前一个轨迹点的经度值, 为相邻两个轨迹点的后一个轨迹点的经度值, 为两点经度之差;R=6378.137(km)为地球半径。
计算任意两个港口之间轨迹集合N内的所有相邻两个轨迹点的距离,然后累计相加,得到某艘船舶在两个港口之间的航行里程。
式(2)中: 代表某艘船舶在两个港口之间所有相邻轨迹点之间的距离和; 代表第 对相邻轨迹点之间的距离; 代表相邻轨迹点对数。
考虑到港口间航运活动的复杂性,需消除单一船型偏差,避免特定船型(如高速集装箱船)对结果的过度影响,同时为满足不同水域计算距离的需要,本研究采用多船型距离加权平均算法来提升模型的泛化性,其不仅适应内河港,通过海船轨迹也能适应沿海港距离测算。港口A与B之间类型为V的船舶平均航行距离计算公式如下:
港口A和B之间所有类型船舶的平均航行距离为:
式(3)~式(4)中: 代表港口A与港口B之间的船舶集合; 代表类型为V的船舶数量; 代表第k艘船舶的类型(如集装箱船,散货船等); 代表船舶k在港口A与B之间的航行总距离。
3 实证分析
3.1 数据来源与说明
本研究实验数据来源于2023年3月海事局进出港报告系统及AIS系统,包括内河与沿海港口的船舶AIS轨迹及进出港报告数据。所选内河港口为宜宾南溪港、宜宾江安港、泸州纳溪港和泸州合江港,沿海港口为唐山港、大连大窑港、大连鲇鱼湾港和烟台芝罘湾港。通过MMSI号关联两类数据,经预处理和航线筛选,剔除断航轨迹后,最终保留完整船舶AIS数据80余万条、进出港报告数据2万余条。
3.2 参数选取
利用DBSCAN聚类算法还原出船舶的停留区域,首先要进行参数选取。在进行实验前,将船舶的经纬度信息进行标准化处理,然后对参数 和 以0.001为初始点,1为终点,步长为0.05进行迭代,通过对迭代结果的综合考量和实验比较,最终选择 =0.451, =6作为输入参数。
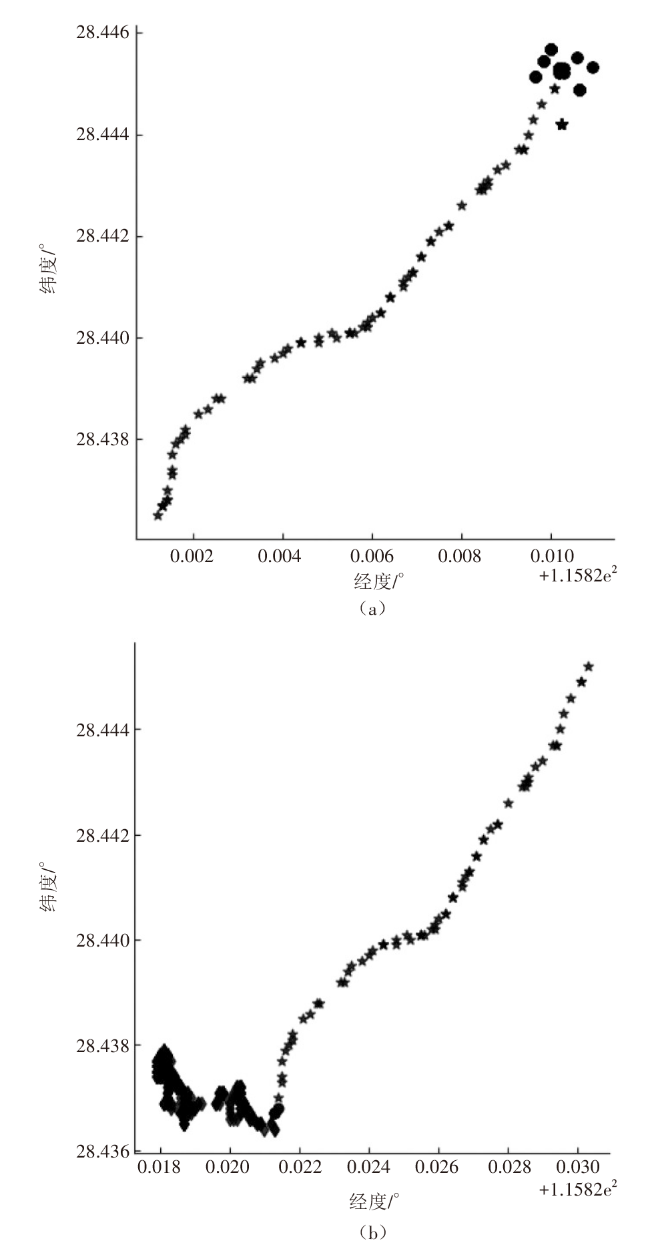
提取某条船舶的航行轨迹点,聚类结果如图6所示。该结果与实际船舶航行情况吻合,且能较好地聚类出船舶的停留区域。
3.3 结果验证
3.3.1 内河港口运输距离测算
通过测算,得到了宜宾南溪港、宜宾江安港、泸州纳溪港、泸州合江港之间的距离矩阵,通过与公布的长江航道港口运输距离数据进行对比(见表7),发现误差在5%以内,说明实验测算结果较准确。
表7 内河港测算距离与实际距离对比 |
| 出发港 | 到达港 | 模型测算 距离/km | 公布距离 /km | 误差 (%) |
|---|---|---|---|---|
| 宜宾南溪港 | 宜宾江安港 | 16.2 | 17 | -4.7 |
| 宜宾南溪港 | 泸州纳溪港 | 61.5 | 64 | -3.9 |
| 宜宾南溪港 | 泸州合江港 | 151.7 | 157 | -3.4 |
| 宜宾江安港 | 泸州纳溪港 | 45.3 | 47 | -3.6 |
| 宜宾江安港 | 泸州合江港 | 135.5 | 140 | -3.2 |
| 泸州纳溪港 | 泸州合江港 | 89.2 | 93 | -4.1 |
3.3.2 沿海港口运输距离测算
沿海港口之间没有官方公布的里程,因此采用GIS地图工具测距的方式测算距离,并与本模型生成的测算距离结果作比较。本研究选取了唐山港、大连大窑港、大连鲇鱼湾港、烟台芝罘湾港4个港口的船舶航行轨迹数据,测算得到港口之间的距离,具体如表8所示。
表8 沿海港测算距离与实际距离对比 |
| 出发港 | 到达港 | 模型测算距离/km | 地图工具测距距离/km | 误差 (%) |
|---|---|---|---|---|
| 唐山港 | 大连大窑港 | 259.3 | 265 | -2.2 |
| 唐山港 | 大连鲇鱼湾港 | 269.9 | 274 | -1.5 |
| 唐山港 | 烟台芝罘湾港 | 276.2 | 284 | -2.7 |
| 大连鲇鱼港 | 大连大窑港 | 7.2 | 7 | 2.9 |
4 结束语
本研究基于船舶AIS数据和进出港报告数据的融合关联,构建了港口运输距离测算模型,实现了内河港口与沿海港口运输距离的高效测算。与传统测距方式相比,该模型具有显著优势:一是基于AIS数据和进出港报告数据计算距离,更符合船舶航行实际情况;二是能动态更新港口运输距离,可及时掌握港口布局调整后的距离变化。实证研究表明,模型的内河与沿海港口距离测算结果与测量结果的平均误差在5%以内,可为提高水路周转量统计的准确性和效率提供数据支撑,具有重要的理论价值和实践意义。但研究仍存在AIS信号覆盖不足、未考虑极端天气情况等局限,未来可以通过挖掘更多海事业务数据,进行多源数据融合,进一步提升模型性能和适用性。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}