

0 引言
高铁站是城市重要的交通基础设施,在人们的生活和地区的发展中扮演着重要的角色。由于高铁站对周围交通流的吸引量大,使得其周围路网承担着较大的交通压力,容易产生区域性的交通拥堵,严重影响旅客的出行。交通控制是解决高铁站周围路网拥堵的有效途径之一,然而,大多数方法均单一地对某一拥堵路段或路口进行管理和控制,容易引起拥堵的转移及在路网范围内的传播[1]。传统区域交通控制在饱和交通状态下收效甚微,基于智能优化算法的区域交通控制也因计算量巨大而难以实现交通的实时控制。因此,有必要结合高铁站周围路网的交通特性,寻求更加合理的区域交通管控措施,以提高高铁站在饱和状态下集散客流和车流的能力。
作为一种描述宏观路网交通特性的交通流模型,宏观基本图(Macroscopic Fundamental Diagrams, MFD)为区域级的交通控制方案实施提供了理论支持。2007年, Geroliminis等[2]利用横滨的实测交通流数据验证了区域路网MFD的存在,它被描述为区域交通状态与存在车辆数之间的关系。由于MFD被证明是道路网的固有特性,且不依赖于路网的OD分布,因此被广泛运用于区域路网的交通控制[3]。在单个区域的边界控制领域,Keyvan-Ekbatani等[4]提出了基于MFD的反馈门限控制方法,该方法有强的鲁棒性,且控制方案简单有效。但在过饱和情况下,当门限处有大量的通行需求时会形成较长的排队。为了缓解边界交叉口的排队压力, Guo等[5]提出了一个考虑排队长度动态变化的边界控制策略,使得边界处的排队现象得到了明显的改善。Geroliminis等[6]研究发现,道路密度的异质性会显著影响路网MFD的拟合效果,使散点图变得离散。因此在制订区域交通控制方案时,通常需要将区域路网划分为道路交通密度方差较小的交通小区。在研究多个子区的边界控制领域,Geroliminis等[7]提出了基于模型预测控制的交通诱导和交通控制方法,该方法在多区域的交通控制中有较好的应用效果,但其建立在准确的预测模型基础上,很难在实际中应用。Haddad等[8]将自适应控制模型应用于区域交通控制,能够跟踪系统状态的变化,使得控制方案更具灵活性,可适应不同的交通场景。王力等[9]考虑了各子区拥堵的差异性,设计了子区间的协同控制策略。然而其控制模型依然未考虑MFD子区边界受控车辆的延误问题,无法保证路网整体运行处于最优状态。丁恒等[10]建立了以整个路网区域的交通性能最优为目标的协调优化模型,并通过遗传算法来求解控制参数。通过该协调控制方法虽然可以得到最优的控制方案,但仅采取边界控制的方法可能会由于绿灯时间的限制而无法完全满足控制需求。Keyvan-Ekbatani[11,12]和Li[13]等提出了考虑边界处排队的区域控制策略。但由于区域拥堵存在一定的时空转移,固定边界的控制方案可能不是最佳的选择。综上,基于MFD的边界控制方法是解决城市道路拥堵的有效途径,而单一的边界控制方法难以解决过饱和状态下区域边界的排队问题。
高铁站周围路网较为特殊,在饱和状态下,它既需要保证单个路段或交叉口的畅通运行,还需要兼顾整个路网的交通状态。区域交通控制是解决高铁站周围路网异质性拥堵的有效措施,MFD为区域边界控制提供了有力的支持。目前基于MFD的交通控制方法大多采取单一的边界控制方案,容易导致车辆在边界处排队较长,从而形成新的拥堵点。 为减少边界控制带来的影响,同时考虑到控制方案的实时性,本文结合高铁站周围路网的交通特性,提出一种将交通诱导与边界控制方案相结合的交通管理方法。其中,诱导方案与边界控制方案的生成均基于区域路网的MFD特性,在满足诱导条件的情况下,优先实施交通诱导方案,以减弱边界控制的强度,防止车辆在边界处形成拥堵,以期实现对高铁站周围路网拥堵的有效治理。
1 基于MFD的诱导-控制方法
1.1 基于高铁站周围路网交通特性的子区划分
通过交通子区的划分可以更精确地得到每个子区的MFD,从而使边界控制以及交通诱导方案更加合理。为了合理划分高铁站周围路网子区,首先需要准确掌握高铁站周围路网的交通特性,主要包括以下方面:
(1)高铁站周围的路网分布一般不均匀,通常在枢纽一侧或多侧路网密度较高。
(2)我国的大型高铁站大多远离城市中心[14],这导致进出枢纽站的交通流分布不均匀,高铁周围时常发生交通拥堵。一般越接近枢纽站,路网交通密度越大。
根据高铁站周围路网的交通特性,结合 Ji等[15]提出的子区划分原则,得到高铁站周围路网子区划分方法如下:
(1)根据路段中进出站车流占总车流的比例确定受高铁站客流影响的路网范围;
(2)根据道路密度和出行需求的分布对路网进行初步划分;
(3)利用道路密度的差异性确定各子区边界。
1.2 基于MFD的诱导-控制模型构建
为缓解高铁站周围路网的交通拥堵以及边界处的排队压力 ,本文提出了一种诱导与边界控制相结合的方法,具体为:每当交通子区的车辆积累量超过临界值且满足相应的诱导条件(即诱导方案的生成取决于相邻子区的交通状态)时,执行交通诱导措施,以避免子区陷入拥堵;当交通诱导措施仍无法满足控制要求时,则加入边界控制措施,通过调整边界处的信号配时来限制车辆的驶入。
为确定各子区的MFD,本文选取区域路网的车辆积累量和行程完成率作为描述宏观基本图的参数,二者呈倒U形曲线关系,基本满足三次函数的关系,即:
式(1)中: , , 均为待确定参数; 为固定的时间间隔; 为子区 在时间间隔k内的车辆积累量(veh); 为子区 在车辆积累量为 时的行程完成率(veh/s)。
本文将单位时间内驶入落客区域的车辆数作为高铁站周围路网的行程完成率,并定义 为路网最高的行程完成率。由于高铁站周围路网的特殊性,行程完成率的提高并不一定表明整个区域交通状态的改善,还取决于落客区服务落客车辆的水平,即单位时间能够完成落客的车辆数(可将其定义为落客周转率 ,与高铁站的停车场和落客平台的规模以及管理相关)。为了减少车辆在落客区的延误,本文将落客周转率也纳入诱导-控制模型中。
1.2.1 诱导模型构建
在诱导模型中,将各子区的MFD所代表的交通流状态作为诱导触发条件,当满足诱导条件时,就将饱和区域的部分交通流诱导至相邻且处于畅通状态下的子区。具体的计算如下:
为简化计算,本文将 和 在一个时间间隔 内视为常量,即:
式(3)~式(4)中: 为单位时间间隔内通过诱导措施进入子区 的车辆; 为单位时间间隔内通过诱导措施从子区 驶离的车辆; 为从子区 到子区 的诱导车辆数(veh); 代表子区域 和 是否为相邻区域,相邻则 否则LNij=0; 和 表示相邻两区域的交通状态。
式(5)~式(6)中: 为可调节参数(0<α<1);Ni, Nj分别为子区i, j的临界车辆积累量(veh)。
若 ,则子区 处于畅通状态,允许接受其他子区的诱导交通流进入。
若 ,则子区 处于过饱和状态,需要诱导部分交通流至其他子区。
式(7)中: 为进行交通诱导后,时间间隔k内子区 的总车辆积累量; 为子区i在时间间隔k内的总流入交通量(veh/s); 为子区i在时间间隔k内的总流出交通量(veh/s)。
1.2.2 边界控制模型
当交通诱导措施无法满足控制需要时,则加入边界控制,通过限制部分车辆的驶入来避免子区陷入拥堵。本文参考Keyvan-Ekbatani提出的反馈调节器模型[4],将交通诱导与边界控制结合,以交通诱导后的子区状态作为边界控制实施的判别依据,形成的边界控制表达式为:
式(8)中: 和 为调节参数。
对于控制阈值 的确定,由于高铁站区域路网的特殊性,控制阈值不仅需要考虑路网的状态,还需考虑高铁站停车位和落客平台的规模。因此,本文定义了两个决定控制阈值的参数,诱导控制子区i达到 时的车辆积累 ,诱导控制子区i对应核心区内的落客周转率达到 时的车辆积累 。最终,控制阈值的取值由 和 共同决定:
1.3 边界处的信号配时计算
为了将总的控制需求分配给各个边界交叉口,本文考虑了进口道车流对信号配时的影响[17],具体计算公式如下:
式(10)~式(13)中: 为边界控制需要限制进入子区的总流量(veh/s); 为控制器得出的子区 的总进站交通量输入(veh/s); 为子区 中控制相位 的交通量(veh/s); 为车道数; 为信号周期(s); 为控制相位的绿灯时间的变化值(s); 为进口车道的饱和流量(veh/s); 为经过边界控制得到的控制相位 的绿灯时间(s); 为子区 中控制相位 的绿灯时间(s), 为子区 中控制相位 的最小绿灯时间 (s); 为子区 中控制相位 的最大绿灯时间(s)。
在信号周期不变的情况下,边界交叉口处控制相位的绿灯时间与流量 成正比。因此,缩短控制相位的绿灯时长即减少流量的输入。最终,通过对边界交叉口控制相位绿灯时长的控制实现对 的控制。
2 实例分析
2.1 区域划分
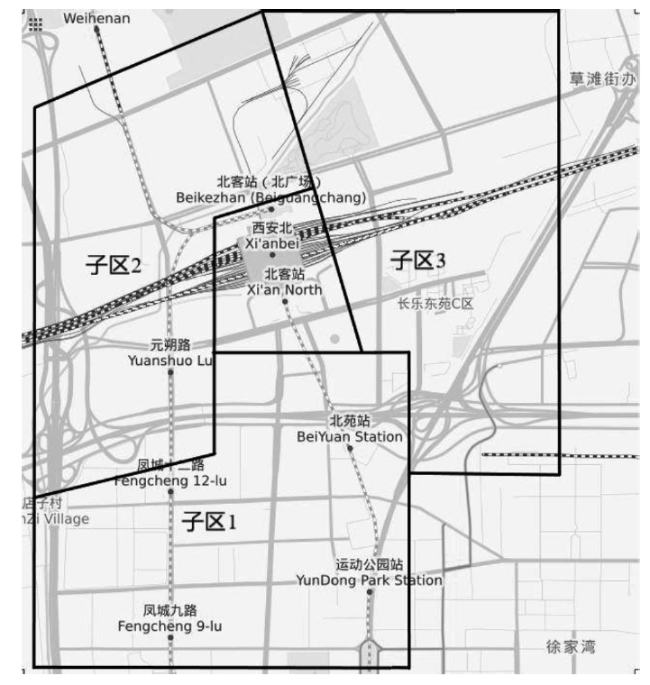
本文选取距西安北站近4km范围内的路网作为研究对象[18]。路网内有18条主要干道和37个信号交叉口。根据其道路特性和交通流特性,本文将路网大致划分为4个区(见图1 ),其中,最中心的方形区域为核心区,西安北站外围的区域为诱导控制区,由于西安北站位于西安市主城区的北侧,咸阳国际机场位于西安市主城区的西北侧,因此主要的交通需求来自高铁站的南侧。根据1.1节提出的子区划分原则,本文将诱导控制区划分为3个不同的诱导控制子区。 图1 中,黑色实线为区域划分边界。
2.2 宏观基本图绘制
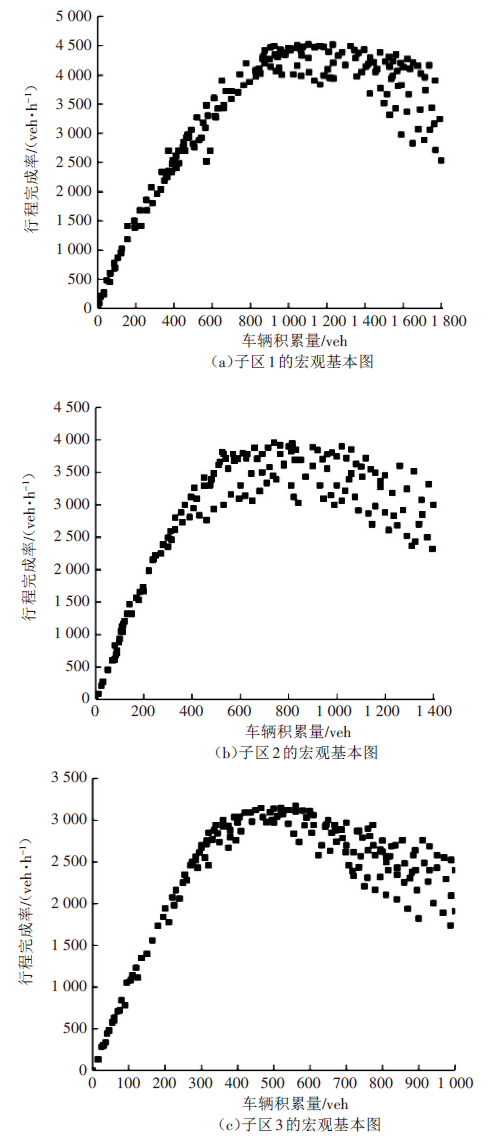
以图1 中西安北站周围路网为对象,利用VISSIM软件进行仿真。根据百度地图提供的路网拥堵数据以及部分交叉口实测数据,对路网早高峰时段的交通运行进行了仿真模拟。分别以单位时间间隔内区域总的车辆数和区域车辆的行程完成率为横纵坐标,绘制研究区域的宏观基本图,如图2 所示。
2.3 参数设置及模型搭建
根据仿真得到的各个子区的散点图,按照三次函数曲线拟合,可以得到每个子区的宏观基本特性以及控制阈值。通过仿真模拟,可以近似得到3个子区所能容纳的最佳车辆数范围。根据图2 所示的散点图分布规律,3个子区的宏观基本属性如表1 所示。
表1 诱导控制子区的宏观基本特性 |
| 区域 | 临界行程完成率 /(veh•h-1) | 临界车辆积累 量/veh | 落客车辆周转率 /(veh•h-1) |
|---|---|---|---|
| 子区1 | 4 494 | 1150~1350 | 1 250 |
| 子区2 | 3 960 | 760~860 | 850 |
| 子区3 | 3 168 | 500~600 | 700 |
得到各个子区的宏观基本属性,就可以确定诱导控制方法中各参数的取值,进而得到完整的诱导控制程序。结合西安北站的实际交通情况,本文考虑了诱导控制子区1和子区2存在过饱和状态的情况,最终确定其控制阈值分别为1 250辆和850辆。
通过确定边界交叉口处的信号配时,可以得到控制相位的最小绿灯时间和最大绿灯时间,进而得到边界控制的范围。通过计算得到本文所研究区域的最大控制交通量输入为3 000veh/h。通过式(11)可以计算每个边界交叉口控制相位的绿灯时间。明光-凤九路口、文景-凤九路口和朱宏-凤九路口的配时结果如图3 所示。
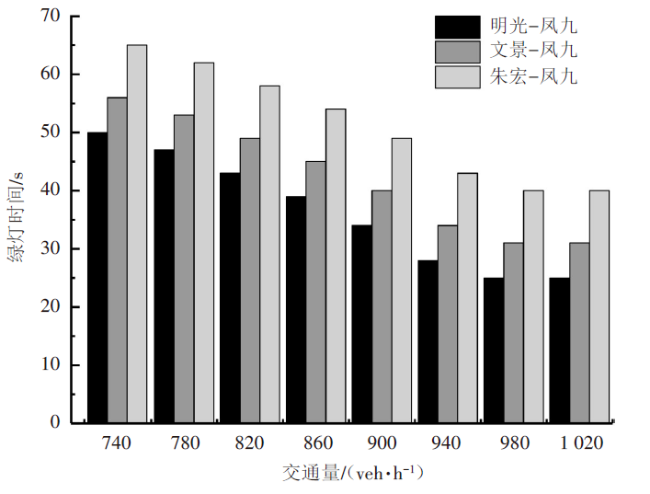
从图3 可以看出,当单车道交通量接近980veh/h时,控制相位的绿灯时间达到了最小值。
每次运行模型时,先执行诱导程序,假设诱导服从率为定值( )[19],当诱导程序不能满足控制要求时,就触发边界控制程序,通过限制交通量的进入来达到控制目的。根据控制结果不断微调,可以得到相对最佳的调节系数( 和 )。调节系数的大小如表2 所示。
表2 调节系数的取值 |
| 控制模型 | ||
|---|---|---|
| 边界控制 | 18 | 4 |
| 诱导-边界控制 | 13 | 3 |
2.4 仿真结果分析
本文模拟对比了西安北站周围路网早高峰时段的交通流在单一边界控制以及诱导控制下路网运行状态的变化,绘制了各子区车辆积累量的变化曲线,如图4 ~图6 所示。
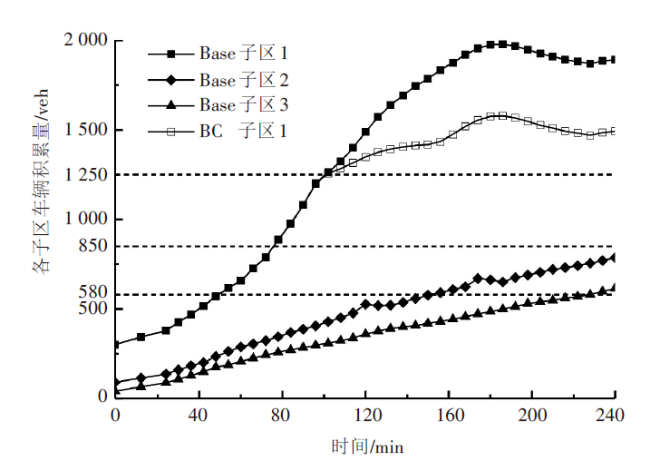
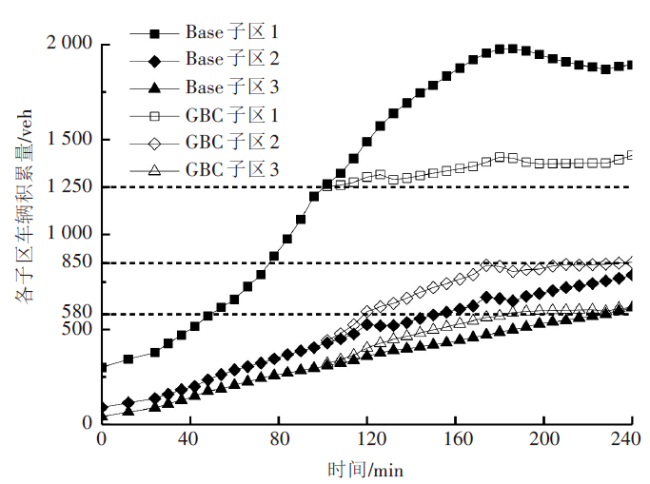
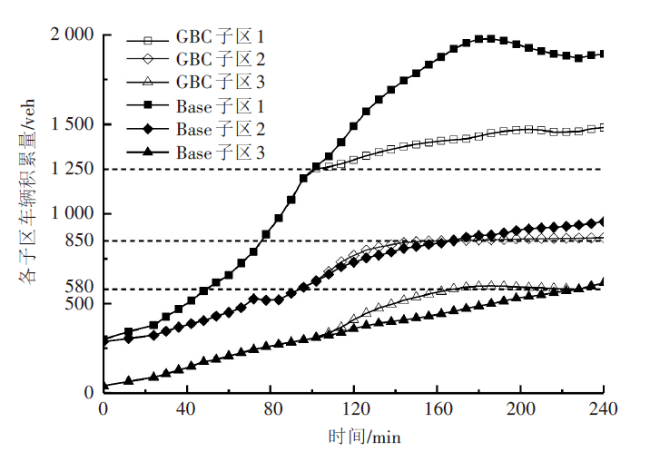
由宏观基本图理论可知,路网的车辆积累量越接近临界积累量,路网的运输性能越好。这表明诱导与边界控制相结合的交通管理措施要优于单一的边界控制方法。
为了得到诱导控制方案对路网运行状态的具体改善效果,本文选取平均车辆延误和平均行程车速作为性能评估指标,以验证诱导-控制方法的有效性。考虑子区1陷入过饱和状态的情况,得到统计结果如图7 和图8 所示。平均车辆延误由两部分组成,一部分为车辆在落客区的延误,一部分为车辆在道路上的行驶延误(包括车辆由于绕行而增加的行驶时间),最终的统计结果为平均每辆的延误。
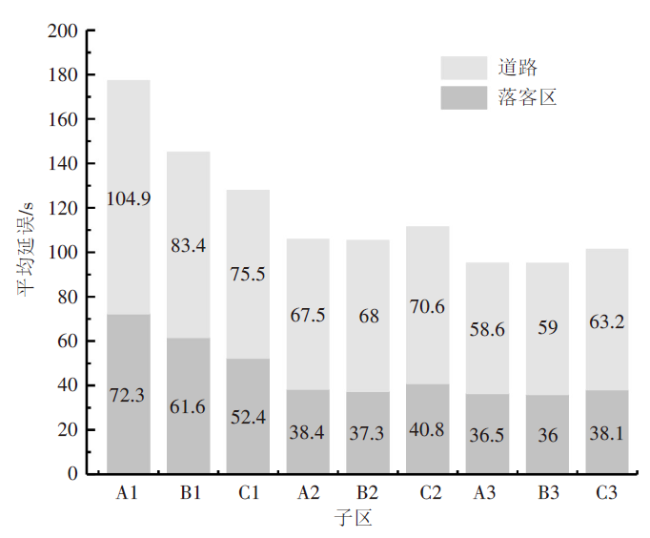
由图7 可得,从平均车辆延误来看,相比于初始状态,在过饱和状态下,单一的边界控制方案使得子区1的平均车辆延误减少了18.17%,其中落客区的延误减少了14.79%;诱导与边界控制相结合的方案使得子区1的平均车辆延误减少了28.22%,其中落客区的延误减少了27.52%。对比3个子区平均延误可以看出,虽然交通诱导会增加子区2和子区3的平均车辆延误,但增加的幅度远不及子区1延误的减少幅度,子区2和子区3的总延误分别增加了5.7s和6.3s,而子区1在诱导-控制下的总延误相比于边界控制减少了17.1s。
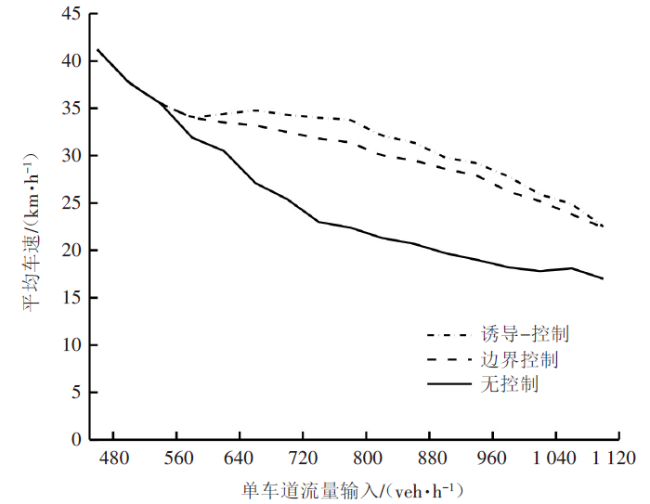
从平均车速来看,边界控制方案使得主要路径的平均行驶车速提高了20.78% ,诱导-控制方案使得平均行驶车速提高了25.39%。随着交通量的增大,两种控制方案的优化效果均有所下降,这是由于路网进入了过饱和状态。通过对比可以发现,基于MFD的边界控制与诱导-控制方法均能明显提升高铁站周围路网的通行效率,但诱导-控制方案下的延误和速度指标要优于单一的边界控制方案。
3 结论
本文结合我国高铁站周围路网的交通特性,提出了一种基于MFD的交通诱导-控制方法,并以西安北站为例进行仿真研究,对这一方法进行了验证。结果表明,该方法有效缓解了周围路网的交通拥堵,提高了高铁站落客区域的通行效率。具体的结论如下:
(1)针对高铁站周围路网,采用交通诱导和交通信号控制的优化策略不仅可以有效缓解高铁站周围路网的交通拥堵,而且还能减小落客区的车辆通行压力。
(2)基于MFD的诱导-控制方法优于单一的边界控制方法,能够使高铁站周围路网在过饱和状态下维持稳定且较高的行程完成率。由于高铁站周围路网交通量分布不均匀,在相邻子区间实施交通诱导可以有效缓解拥堵区域的交通压力,减小边界控制强度,从而缓解车辆在边界处的拥堵。
本文是在假定诱导服从率为定值的情况下开展研究,而实际应用中,由于诱导效果存在较大的不确定性,且交通流有强的波动性,应考虑建立动态的交通诱导与边界控制的协调机制,以增强控制方案的鲁棒性。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}